EPOS4 位置制御ユニット 運転モード概要
EPOS4位置制御ユニットは、フルデジタルの小型モーション・ドライバです。フレキシブルで高効率な出力段により、そのタイプ(容量)によって、最大1050W までのエンコーダ付き DC モータとエンコーダ/ホールセンサ付きブラシレス (EC) モータのどちらも駆動可能です。
また、CANopen または EtherCAT ネットワークのスレーブ・ノードとしての制御を主としてデザインされていますので、制御にはマスター(PLC、PC、マイコンなど)が必要になります。
ここでは、EPOS4 位置制御ユニットの運転モードを、マスターとの関係性も含め説明致します。
EPOS4では下記制御が可能です。
ー 位置制御
ー 回転数制御
ー トルク(電流)制御
各制御ごとに運転モードを説明します:
<位置制御>
・ Profile Position Mode
設定したプロファイル(下図赤点線。加速度、等速度、減速度)に沿って、指令位置まで移動するPTP(Point to Point)制御です。マスターから指令位置(Target Position)および動作開始コマンドを送信すると、モータは指令位置へ向かい動作を開始します。動作中は、EPOS4内部でプロファイルを基に生成された軌跡(下図赤線)で位置制御されます。
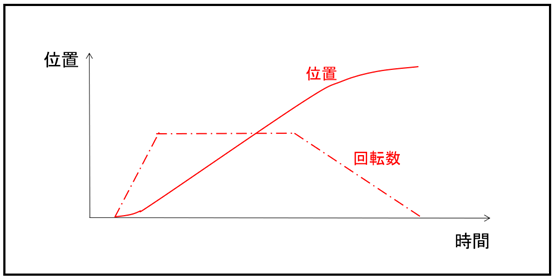
なお、指令位置を原点からの絶対位置とするか、または現在位置からの相対位置として制御するかの選択が可能です。
・ Cyclic Synchronous Position Mode(CSP,サイクル同期位置制御)
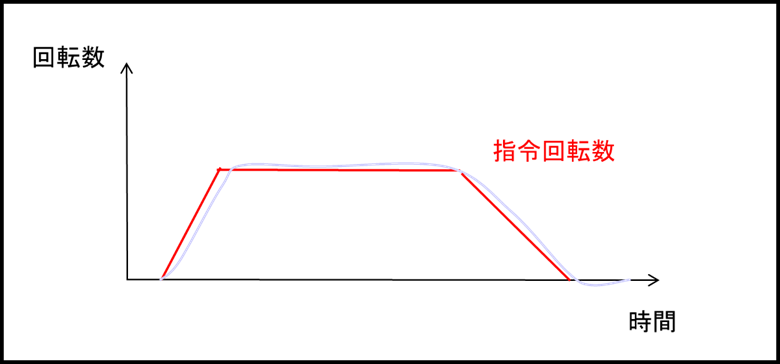
マスター側でパス(時間当たりの指令位置)を算出し、指令位置を周期的かつ同期的にEPOS4へ送信します。EPOS4側では、受け取った指令位置に対して最短で到達するように制御します。

EPOS4側では周期的に受け取った指令位置は階段状になります。マスターからの送信周期が短いほど(EPOS4側で受け取れる最短周期は1ms)滑らかな動作になりますが、補間機能を使用しても同様に滑らかな動作になります。補間機能詳細はこちらの別コラムをご参照ください。
Profile Position Modeおよびサイクル同期位置制御 CSPの詳細は、こちらの別コラムも併せてご参照ください。
<回転数制御>
・ Profile Velocity Mode
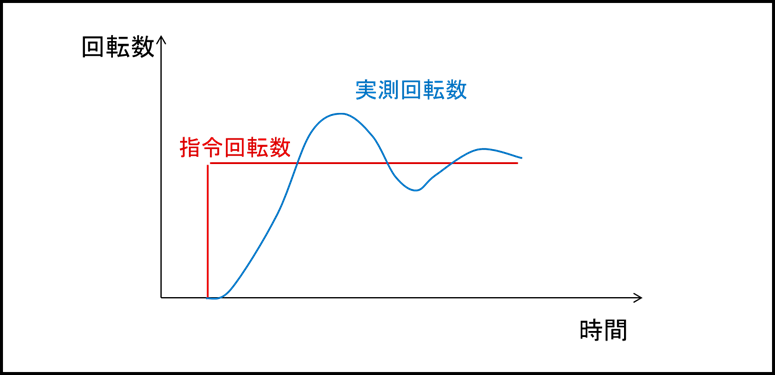
設定した加速度で指令回転数に向かい、その回転数を維持する回転数制御です。マスターから指令回転数(Target Velocity)および動作開始コマンドを送信すると、モータは設定した加速度で指令回転数に向かい動作を開始します。次の指令回転数を受け取るまでは、その回転数を維持するように制御します。マスターから停止コマンドを受け取ると、設定した減速度で減速し停止します。
・ Cyclic Synchronous Velocity Mode(CSV,サイクル同期回転数制御)
マスター側でパス(時間当たりの指令回転数)を算出し、指令回転数を周期的かつ同期的にEPOS4へ送信します。EPOS4側では、受け取った指令回転数に対して最短で到達するように制御します。
EPOS4側では周期的に受け取った指令回転数は、加減速時には階段状になります。マスターからの送信周期が短いほど(EPOS4側で受け取れる最短周期は1ms)滑らかな動作になりますが、補間機能を使用しても同様に滑らかな動作になります。補間機能詳細はこちらの別コラム(説明は位置制御でしていますが補間機能は同様です)をご参照ください。
<トルク(電流)制御>
・ Cyclic Synchronous Torque Mode(CST,サイクル同期トルク制御)
マスター側でパス(時間当たりの指令トルク)を算出し、指令トルクを周期的かつ同期的にEPOS4へ送信します。EPOS4側では、受け取った指令トルクに対して最短で到達するように制御します。
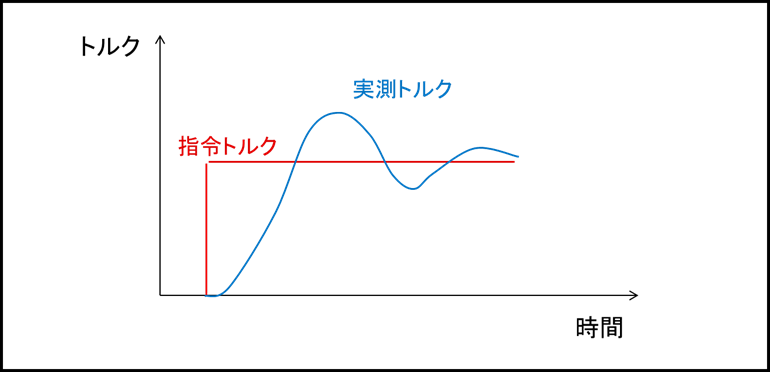
マスターからの指令トルク(Target Torque)は、“トルク値”ではなく“モータの最大連続トルク(Motor rated torque)のパーセント(0.1%単位)”で送ります。
EPOS4には上記運転モードの他に、原点出しを目的としたHoming Modeが実装されています。
<その他>
・ Homing Mode(原点出し)
EPOS4の現在位置情報(Position Actual Value)は、EPOS4の電源ONで“0”となります(アブソリュートエンコーダ使用時はエンコーダからの絶対値)。装置の原点に合わせるために、様々な方法が用意されています。
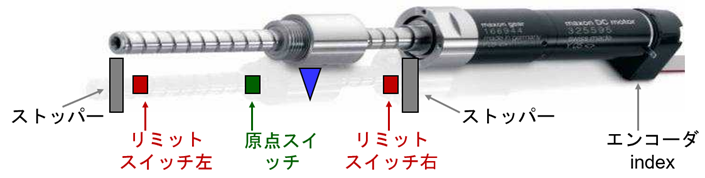
例えば、原点スイッチを検知し、その位置を原点(Position Actual Value = 0、または設定した値)にする、機械的ストッパに当ててモータ電流の上昇を検知し、その位置から少し戻った位置を原点にするなど、各種方法(Method)が利用可能です。
詳細はこちらの別コラムを参照ください。
なお、本コラム冒頭でEPOS4の制御にはマスターが必要と記載しましたが、サイクル同期回転数制御(CSV)およびサイクル同期トルク制御(CST)では、通信を介さないアナログ電圧での指令も可能です。
この場合は、EPOS4側でアナログ入力の設定およびEnable/Disable切替のためにデジタル入力の設定も必要になります。
(KASA)


