EPOS4のサイクル同期位置制御(CSP)の補間機能とは?
EPOS4のサイクル同期位置制御(CSP, Cyclic Synchronous Position mode)は、マスターからの指令位置に対して、最短で到達しようと制御します。
そのため、マスターとの高速通信によるリアルタイム制御に適している反面、指令位置の更新周期や移動量、負荷の状態などによっては振動や騒音が発生する場合があります。
これを防ぐため、EPOS4では指令位置間を補間する機能があります。
下図は補間機能なしの例です。横軸が時間で縦軸が位置です。
(初期設定用ソフト EPOS Studioの“Data Recorder”にて取得)
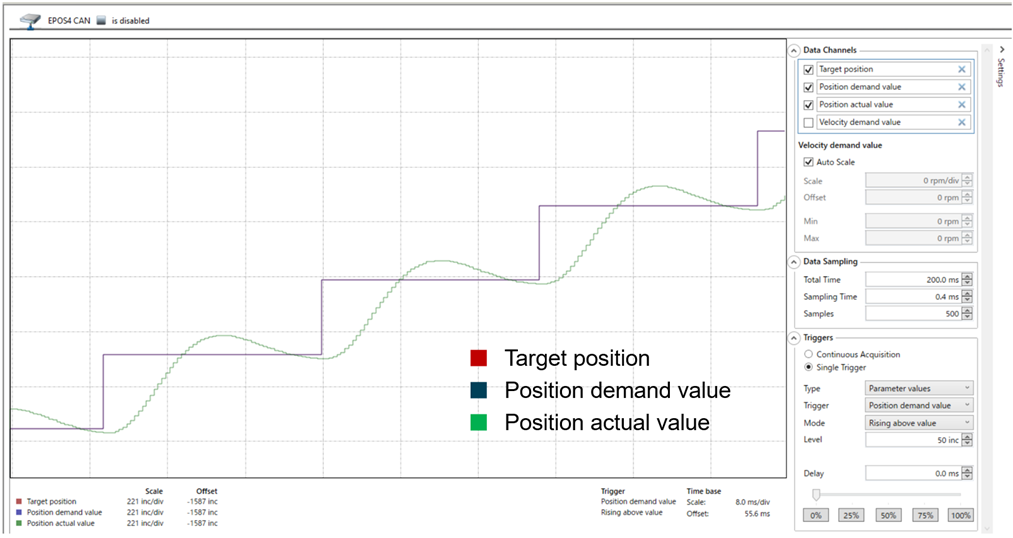
この例では、マスターからの指令位置(Target Position)は20ms周期で送られおり、EPOS4内部での指令位置(Position demand value)はTarget Positionに等しくなっています(赤線と青線が重なっている)。
実際の位置(Position actual value)は波打っており、これが振動や騒音を生みます。
ここで、補間機能を有効にします。
補間機能はObject “Interpolation time period value”(Object ID: 0x60C2, subindex: 0x01) に値を入力すると有効になります(デフォルト値: 0 ←無効)。
Target Positionの更新周期が20msですので“20”を入力します。
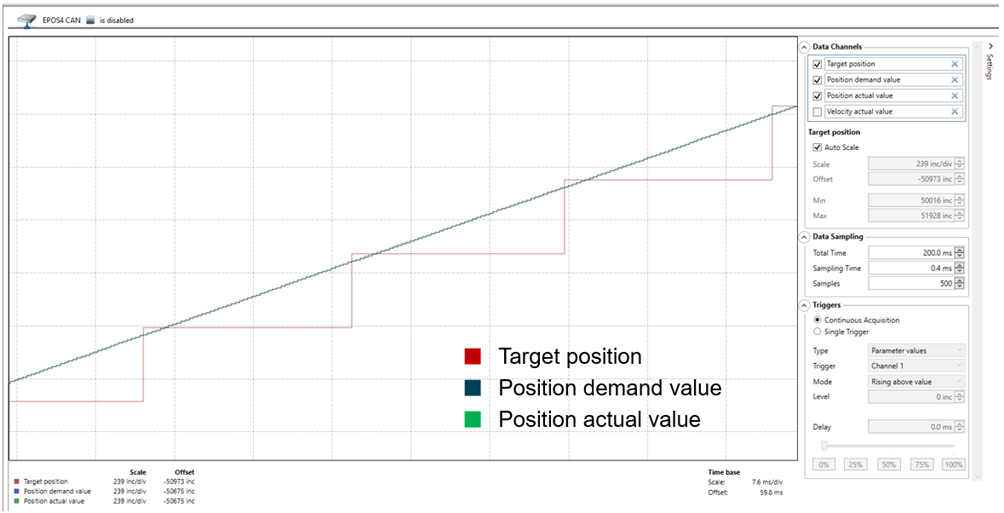
ステップ状のTarget Positionに対して、EPOS4内部の指令位置 Position demand valueは補間され直線状になっています。実際の位置 Position actual valueはこれに追従し滑らかな動作になっています(青線と緑線が重なっている)。
Interpolation time period valueは、Target Positionの更新周期と同じ値にしてください。
値が違う場合、正常に補間されません。
下図はTarget Position周期20msに対して、Interpolation time period valueに40(ms)を入力した例です。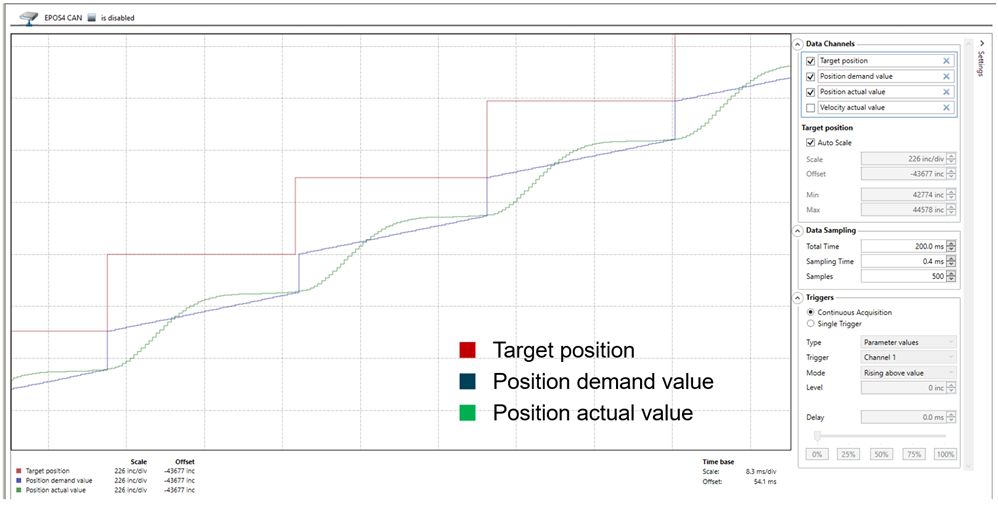
なお、EPOS4のサイクル同期位置制御CSPおよびサイクル同期回転数制御CSVの最小サイクル時間(Target Position/Velocity更新周期)は1msです。そのため、Interpolation time period valueの最小値も1msとなります。


