ブラシレスモータのPWM駆動にて、生成する波形が正弦波(ベクトル制御)の場合と矩形波(120°通電制御)の場合に、モータの出力特性上どのような違いが起こりますか
ブラシレスDCモータは、永久磁石がロータとして回転する構造のため、誘起電圧が正弦波交流となります。分類上も、交流モータの一種とされています。
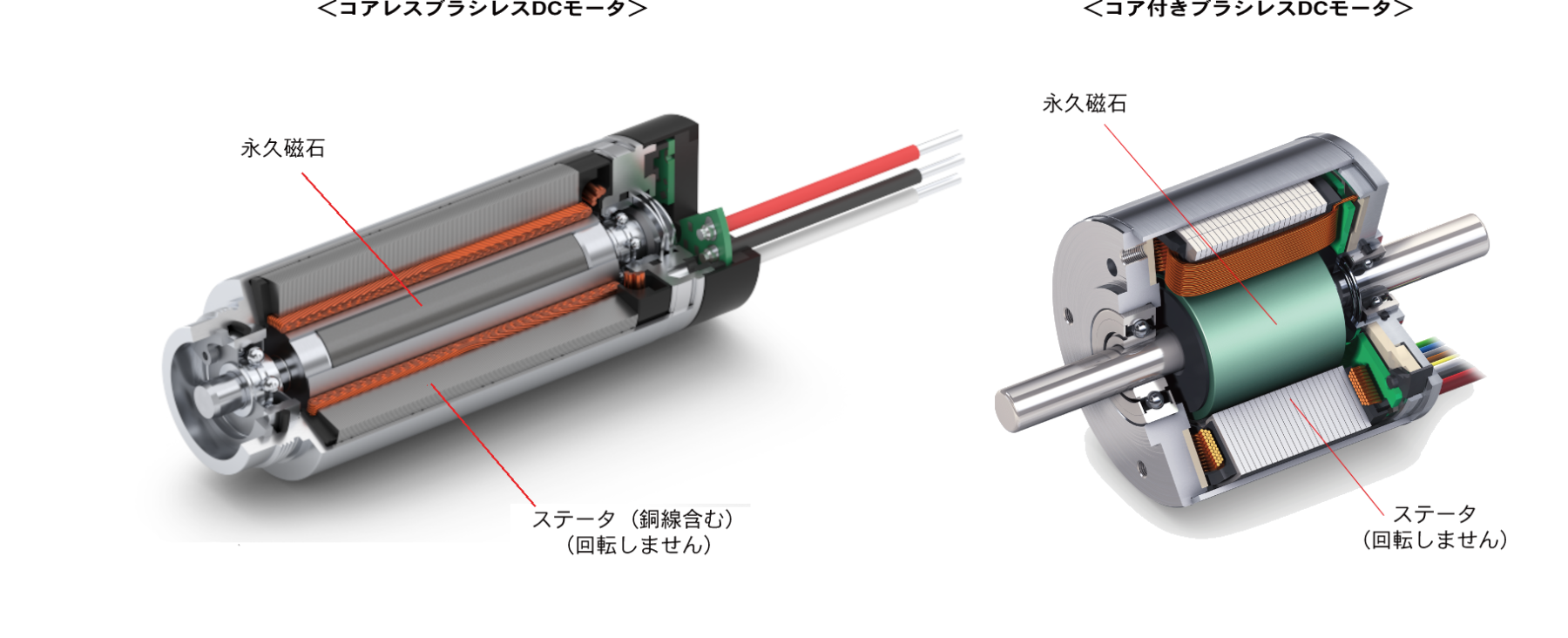 図1.ブラシレスモータの内部構造のイメージ
図1.ブラシレスモータの内部構造のイメージ
120°通電制御(矩形波)では、ステータの巻線に流れる電流の方向を電気角60°ごとに切り替えます。これにつれて、ステータ側の磁界の向きも60°おきにステップ状に切り替わるので、発生トルクが脈動し、音・振動や効率の面で不利となります。また、トルクの脈動は、エンコーダの分解能を上げても残ることから、高いトルク精度が必要な用途では注意を要します。一方で、生成するPWM波形が単純で、コントローラ側に高い演算処理能力を求めないため、正弦波とくらべ高速回転が可能です。
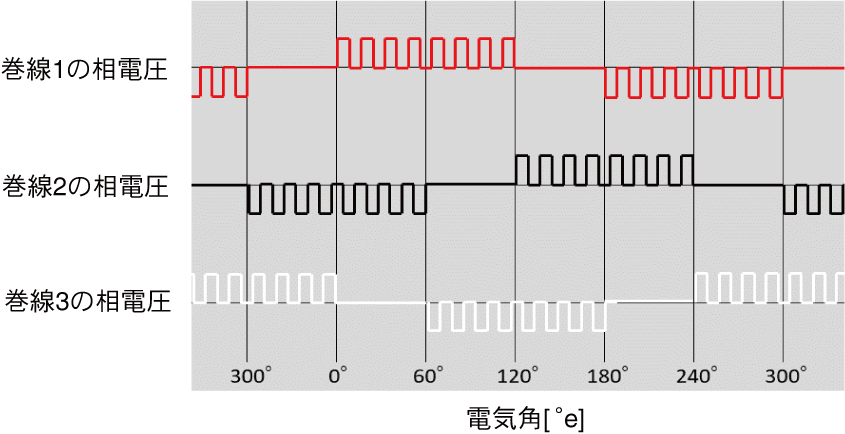
図2.PWM生成波形が矩形波のときの印加電圧のイメージ
PWM波形を正弦波とすれば、誘起電圧とのバランスをとりながら電流を安定的に制御できるうえ、ステータ側の磁界の向きをロータの位置に合わせ、滑らかに変化できます。この結果、トルクの脈動が理論上無くなり、音・振動、効率、トルク精度や過渡特性の面でも有利となります。不利な点は、ひずみの少ない正弦波をPWM生成するため、高い演算能力をもつコントローラが要求されることです。maxon製の一部コントローラでは、矩形波と正弦波の切り替えを可能とした機種がありますが、演算能力上の制約により、矩形波を選択した方が最大回転数を高めることができます。
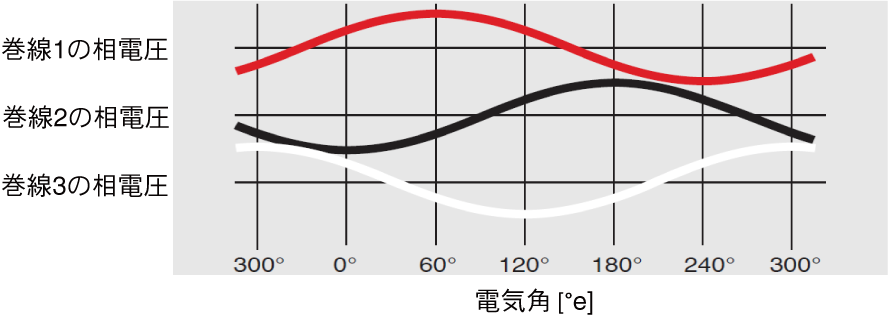
図3.PWM生成波形が正弦波のときの印加電圧のイメージ
maxon製のコントローラ(EPOS4)で正弦波を利用するには、ブラシレスモータ本体にエンコーダを取り付ける必要があります。
<起動開始の瞬間から正弦波で駆動する場合>
→ ブラシレスモータ本体 + アブソリュートエンコーダ(SSI仕様)
<起動時の1回転のみ矩形波、その後正弦波に切り替える方法が許容される場合>
→ ブラシレスモータ本体 + ホールセンサ + インクリメンタルエンコーダ
maxon製のコントローラで矩形波を利用する場合、位置制御など高い制御性を求められる用途では、エンコーダの取り付けをおすすめします。
(HIIT)


