EPOS4/EPOS2運転モード:Homing modeに関して
Homing mode
EPOS4/EPOS2位置制御ユニットでの現在位置情報(Actual Position)は、電源がOFFになるとクリアされ、電源ON時には0になります(インクリメンタル・エンコーダ使用時)。
そのため、位置制御で使用される場合、実際の動作前に装置側の機械的原点(0地点)とコントローラ側(EPOS4/EPOS2)の原点を合わせる(原点出し)際に使用するのがHoming modeです。
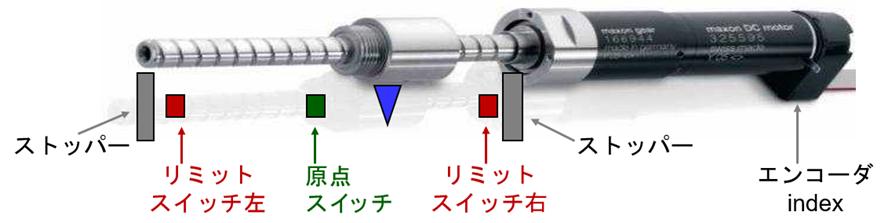
機械的原点の検出には、原点スイッチやリミットスイッチなどのスイッチ類、機械的ストッパー(電流閾値)、エンコーダのIndex信号(モータ軸1回転で1回出力)が使用可能です。
使用する原点検出方法により、Homing modeのHoming Methodを選択します。
なお、説明図内右側がPositive(モータCCW[反時計回り])方向になります。
原点スイッチ
原点スイッチを使用する場合のHoming Methodは下記のとおりです。
‐ Home Switch & Positive Speed
‐ Home Switch & Negative Speed
- Home Switch & Positive Speed & Index
- Home Switch & Negative Speed & Index
Homing Switchの後の & Positive/Negative Speedは、原点スイッチまで向かう方向です(Positive:モータCCW[反時計回り]、Negative:モータCW[時計回り])。
さらにその後の & Indexは、エンコーダのIndex信号を利用する方法で、原点スイッチON検知の僅かな位置のばらつきを解消し、より正確で反復性の高い原点出しを可能とします。
実際の動作は下記の通りです(Home Switch & Positive Speed & Indexでの例)。
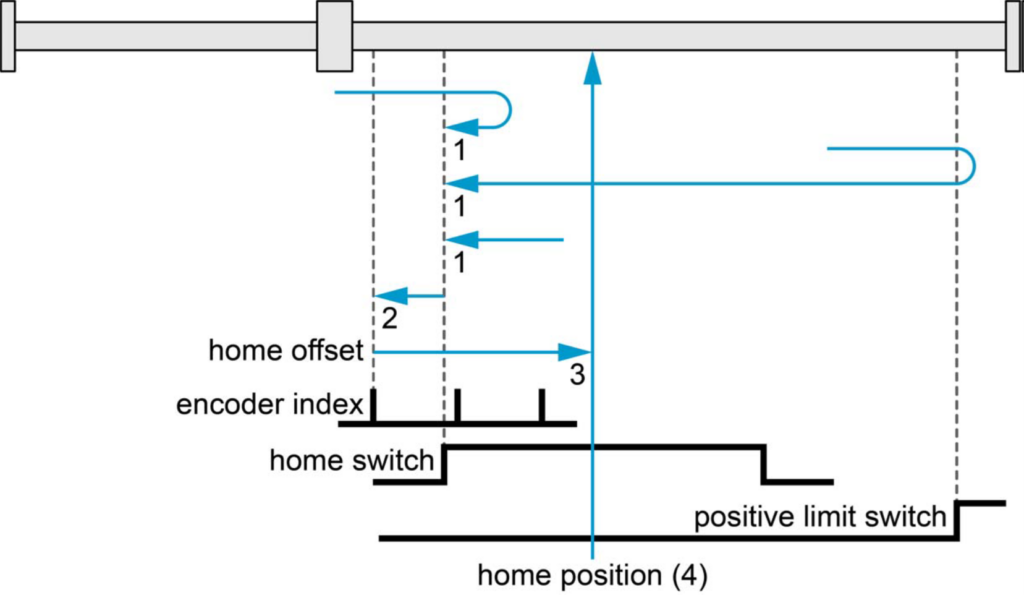
- (原点スイッチOFF位置からスタート時)モータはPositive(CCW)方向に“Speed for switch search”で設定した回転数で回転し、原点スイッチの立ち上がりエッジを検知(原点スイッチを超えていた場合はリミットスイッチを検知して逆回転してエッジを検知)
(原点スイッチON位置からスタート時)モータはNegative(CW)方向に“Speed for switch search”で設定した回転数で回転し、原点スイッチの立ち下がりエッジを検知 - “Speed for zero search”で設定した回転数でエンコーダIndex信号を検知
- “Speed for switch search”で設定した回転数でHome offset分Positive方向に移動
- 現在位置(Actual Position)が原点(Home Position:デフォルト値“0”)に設定される。
注意:
Homing Methodで原点スイッチを使用する場合は、EPOS Studioでスイッチが接続されたデジタル入力を、“Home switch”に設定する必要があります。
EPOS4の場合:Wizards → Startup → Digital Inputs または Tools → I/O Monitor
EPOS2の場合:Tools → I/O Monitor
リミットスイッチ
装置可動域の両端(Positive/Negative)などに設置したリミットスイッチを使用する場合のHoming Methodは下記の通りです。
‐ Positive Limit Switch
‐ Negative Limit Switch
‐ Positive Limit Switch & Index
‐ Negative Limit Switch & Index
モータがPositive方向(CCW[反時計回り])に回転した時の終端点に設置されているのがPositive Limit Switchで、その逆がNegative Limit Switchです。
& Indexは原点スイッチの時と同様に、エンコーダのIndex信号を併用する方法です。
実際の動作は下記の通りです(Position Limit Switch & Indexでの例)。
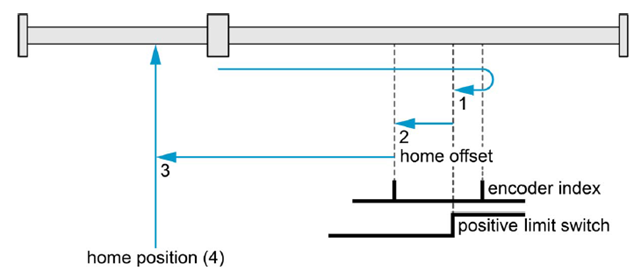
- モータはPositive(CCW)方向に“Speed for switch search”で設定した回転数で回転し、リミットスイッチ(Positive Limit Switch)の立ち上がりエッジを検知
- “Speed for zero search”で設定した回転数でリミットスイッチの立ち下がりエッジまで戻り、その後エンコーダIndex信号を検知
- “Speed for switch search”で設定した回転数でHome offset分Negative方向に移動
- 現在位置(Actual Position)が原点(Home Position:デフォルト値“0”)に設定される
注意:
Homing Methodでリミットスイッチを使用する場合は、EPOS Studioでスイッチが接続されたデジタル入力を、“Positive limit switch”や“Negative limit switch”に設定する必要があります。
EPOS4の場合:Wizards → Startup → Digital Inputs または Tools → I/O Monitor
EPOS2の場合:Tools → I/O Monitor
機械的ストッパー
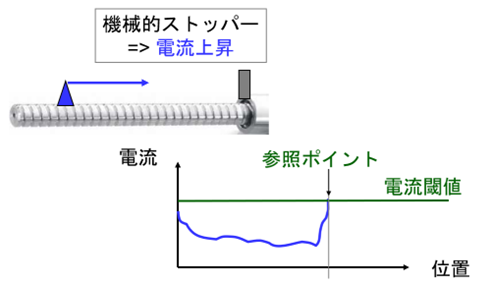
スイッチ類を使用せず、装置内の機械的ストッパーより上昇したモータ電流値を閾値として使用することも可能です。
機械的ストッパー(電流閾値)を使用する場合のHoming Methodは下記の通りです。
‐ Current Threshold Positive Speed
‐ Current Threshold Negative Speed
‐ Current Threshold Positive Speed & Index
‐ Current Threshold Negative Speed & Index
Positive/Negative Speedは、機械的ストッパーへ向かう方向になります。
& Indexは、エンコーダのIndex信号を併用する方法です。
実際の動作は下記の通りです(Current Threshold Positive Speed & Indexでの例)。
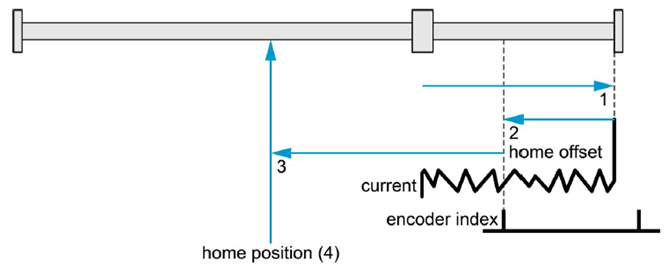
- モータはPositive(CCW)方向に“Speed for switch search”で設定した回転数で回転し、“Current threshold for homing mode”で設定した電流閾値を検知(ストッパーに当たったことを検知)
- “Speed for zero search”で設定した回転数でエンコーダIndex信号を検知
- “Speed for switch search”で設定した回転数でHome offset分Negative方向に移動
- 現在位置(Actual Position)が原点(Home Position:デフォルト値“0”)に設定される
エンコーダIndex信号
可動域がモータ軸2回転に満たない場合(エンコーダIndex信号が1回)に有効です。
エンコーダIndex信号を使用する場合のHoming Methodは下記の通りです。
‐ Index Positive Speed
‐ Index Negative Speed
Positive/Negative Speedは、Index信号を探す方向になります。
実際の動作は下記の通りです(Index Positive Speedでの例)。
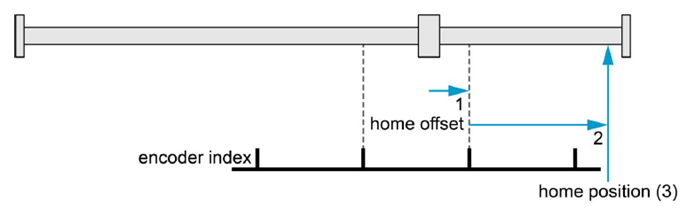
- モータはPositive(CCW)方向に“Speed for zero search”で設定した回転数でエンコーダIndex信号を検知
- “Speed for switch search”で設定した回転数でHome offset分Positive方向に移動
- 現在位置(Actual Position)が原点(Home Position:デフォルト値“0”)に設定される
その他
その他に下記Homing Methodも使用可能です。
‐ Actual Position
このMethodではモータは動作せず、現在位置をそのまま原点(Home Position:デフォルト値“0”)に設定します。
装置を手動で原点まで動かした場合や、現在位置のカウントクリアとしても使用できます。
このようにHoming Modeには各種Methodが用意されており、ご使用の環境に最適な方法を選択可能です。
(KASA)


