コア付き巻線のブラシレスモータ(EC-i、EC-flat、EC frameless、ECX Torque)を選定するにあたり、どのようなことに気を付ければよいですか
「コア付き巻線」は、巻線(コイル)内部に鉄(コア)を充填した構造により、「コアレス巻線」に比べ高いトルクをに経済的に得られる反面、以下のような点に注意が必要です。
1. インダクタンスが高い(高速域でのトルク低下)
コアレスとくらべ巻線のインダクタンスが増えるため、電流の立ち上がりが遅くなります。これにより、電流が完全に立ち上がらず、期待したトルクが得られない原因となります(下図参照)。
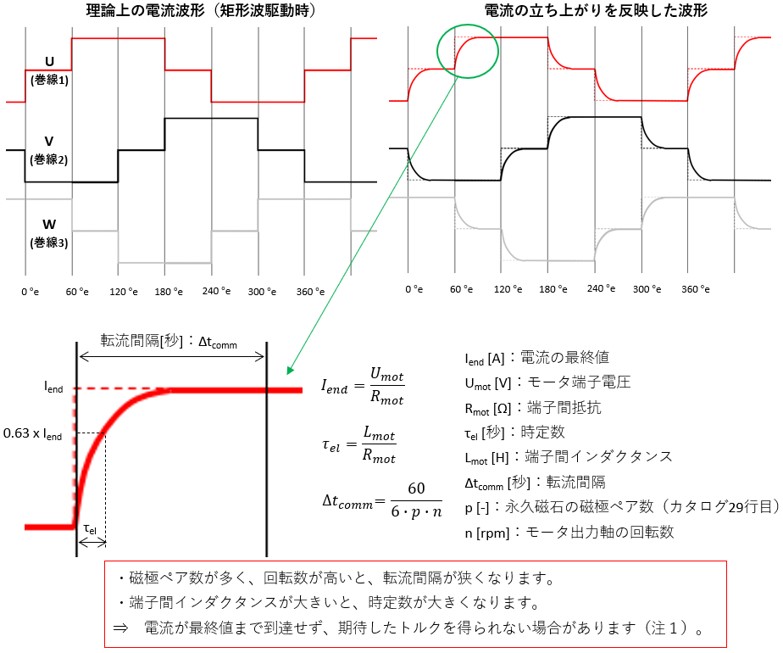
この事象は、出力特性図上では下図のような変化として現れます。
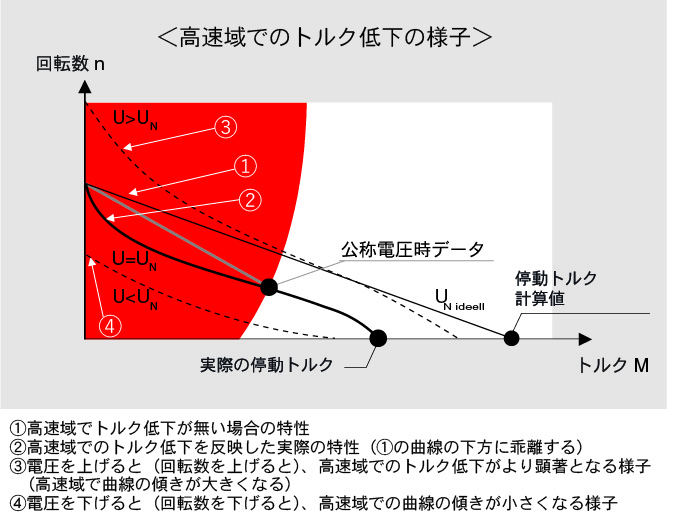
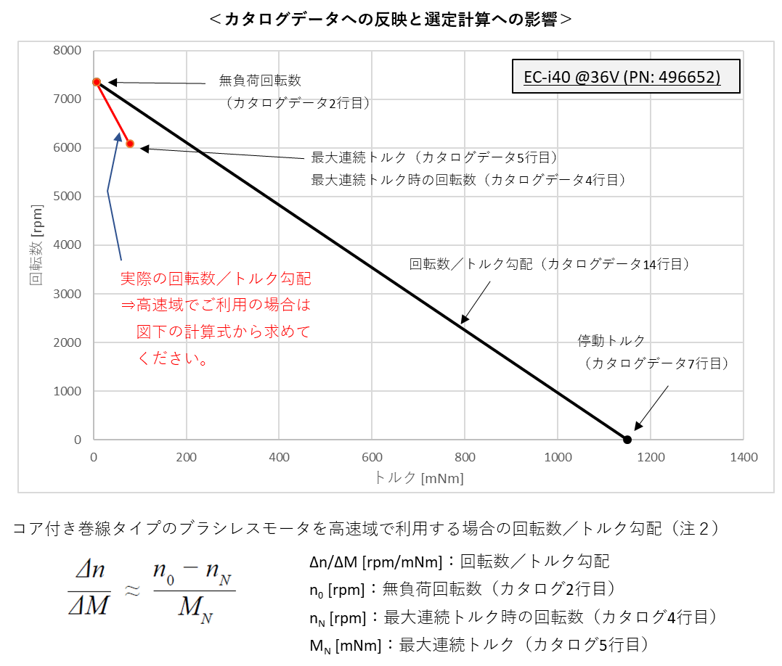
これはカタログデータにも反映されており、たとえばEC-i40では下図のように、最大連続電流時の動作点が下方に乖離します。この結果、高速域で利用される場合は、カタログデータに記載の「回転数/トルク勾配」は適用せず、図下の式で計算し直す必要があります。必要な回転数を得るのにより高い電圧が必要となりますのでご注意ください。
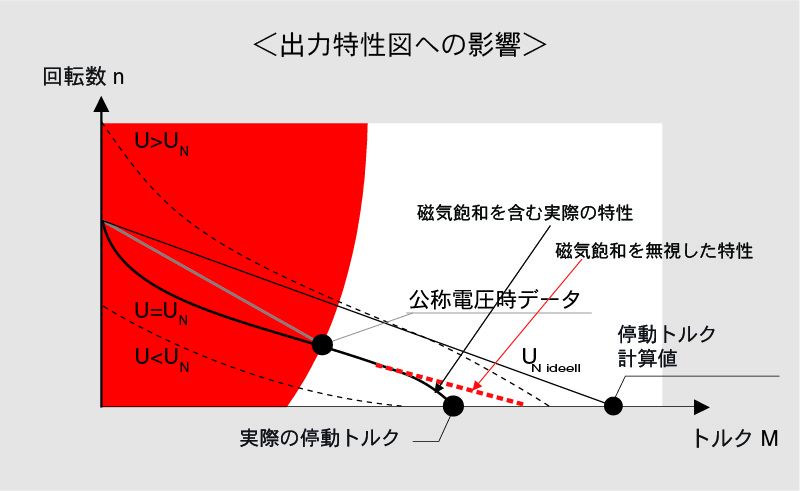
2. 磁気飽和(低速域でのトルク低下)
コイルに電流を流すことで発生する磁界によりコア(鉄)が磁化するため、コアレス構造より多くの磁束を得ることができますが、ある電流を超えるとコアが磁化しなくなることで(=磁気飽和)、カタログ12行目の「トルク定数」が漸減します。
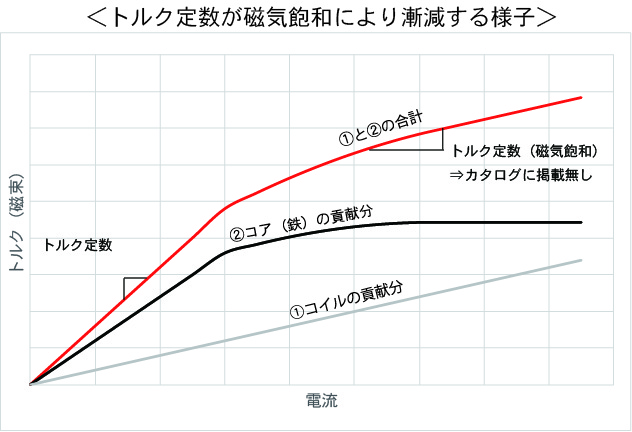
これにより、出力特性図には下図のような変化が現れ、カタログデータ7行目の「停動トルク」と8行目の「起動電流」に影響を及ぼすものの、多くの使途において、停動トルク・起動電流の発生は短時間に限られるうえ、コントローラ側の出力電流にも制約のあることを考慮し、カタログには磁気飽和を無視した「トルク定数」、「停動トルク」、「起動電流」を記載しております。
3. コギングトルク
コアレス巻線には無いコギングトルクが発生します。これに伴うトルクリップルにより、低い回転数で出力軸を安定的に駆動するのが難しくなるほか、高精度な位置制御には不向きで、振動や作動音の観点でも不利となります。
4. ロータ慣性モーメント(アウターロータ型のみ該当)
EC-flatとEC framelessシリーズでは、より高いトルクを出力するため、モータのハウジング内壁に磁石を配置し、これを回転します(アウターロータ)。この結果、慣性モーメントが他のモータとくらべ大きいため、高い応答性を求められる用途には不向きです。
5. 空冷と連続運転範囲(アウターロータ型のみ該当)
EC-flatでは、アウターロータに穴を設けることで、巻線の温度上昇を抑え、連続運転範囲を拡大することが可能です。カタログには、「オープンロータ」や「クーリングファン」仕様として掲載しております。この効果は主に高速域で期待できるもので、低速域では効果が小さくなります。なお、モータへのダスト侵入や作動音への影響は別途考慮する必要があります。
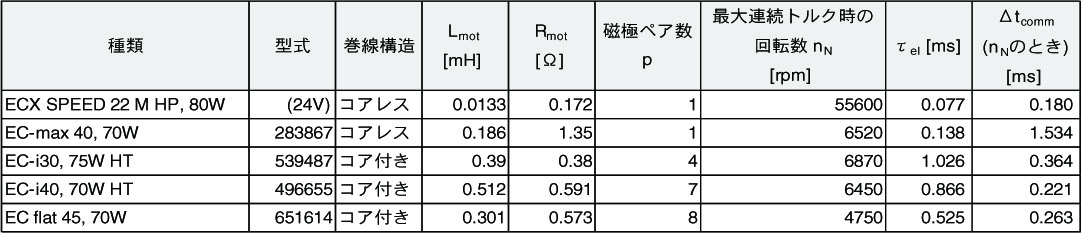
注1: 各種ブラシレスモータについてτelとΔtcommを求めると、下表のようになります。コアレス巻線の場合はτelがΔtcommを大きく下回るのに対し、コア付き巻線の場合はτelがΔtcommを上回る様子がみられます。
注2:
計算例(EC-i40 (PN: 496652)を用いた例):
カタログ上の回転数/トルク勾配は、6.48 rpm/mNmですが、実際の回転数/トルク勾配は次の計算のとおり16.2rpm/mNmとなります。

ここで、100mNmの負荷を5000rpmで回転させるのに必要な電圧を求めます。
A) カタログ上の回転数/トルク勾配を用いる場合

B) 実際の回転数/トルク勾配を用いる場合

⇒この計算例のように、同じ回転数でも駆動するのに必要な電圧が大きくなります。
(HIIT)


