ブラシレスモータ

マクソンモータにはブラシレスの製品プログラムがあります。
電子的な整流回路を持っているため寿命が長いのが特長です。
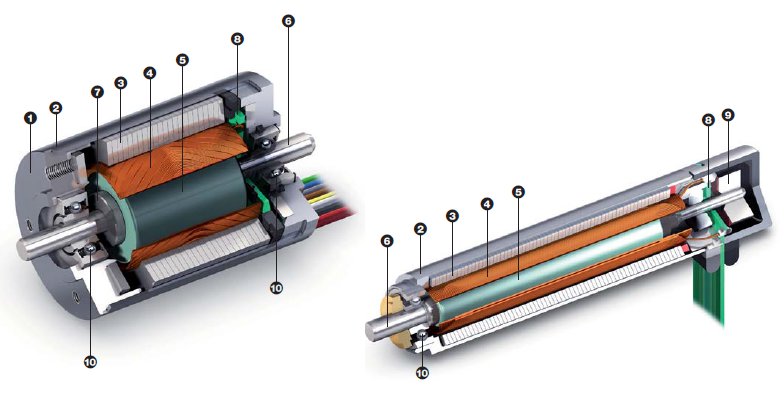
- フランジ
- ハウジング
- ラミネート・スチール
- 巻線
- 永久磁石
- シャフト
- バランス・ディスク
- ホールセンサ基板
- ホールセンサ用磁石
- ボールベアリング
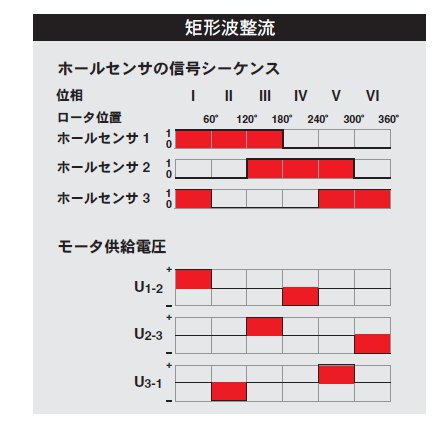
矩形波整流
ロータ位置はモータに内蔵された3個のホールセンサで検出されます。円周上の120°毎に配置された3個のホールセンサが、1回転につき6種類の組み合わせを出力します。
3組のコイルセグメントには、ホールセンサからの位置情報に6位相に応じた電圧が供給されます。電流と電圧は矩形波となります。各々のピークトルクから30°の位置でスイッチングが行われます。
矩形波整流のプロパティ
- 比較的シンプルで低価格の電子回路
- 起動プロセスに問題なし
- 高起動トルクと高加速が可能
- マクソンECモータのデータシートは矩形波整流を条件としている
応用例
- 高ダイナミック・サーボドライブ
- 起動/停止の繰り返し運転
- 簡易的な位置制御
ロータ磁極ペア数が1である場合の例
ロータ磁極ペア数がNである場合には、ロータ位置はNで除算
センサレス整流
ロータ位置は誘導電圧により決定されます。電子回路は誘導電圧(EMF)のゼロ通過点を検出し、回転数に依存した停止時間後(EMFゼロ点通過後30°)にモータ電流を整流します。誘導電圧の振幅は回転数に比例します。モータ停止時や低回転時には誘導電圧が小さすぎるためゼロ通過点を正確に検出することができなくなります。これが起動時に特別なプロセスが必要になる理由です(起動時に、電流を正逆に流す―シャフトが正逆に振れる)。
△結線かつ3線式のブラシレスモータも駆動できるように、電子回路内部で仮想の中点を造っています。
センサレス整流のプロパティ
- 特別な起動プロセスが必要
- 低回転での運転は不向き(不可能)
- 起動/停止を繰り返す用途には不向き
応用例
- 高回転での連続運転
- ファン駆動
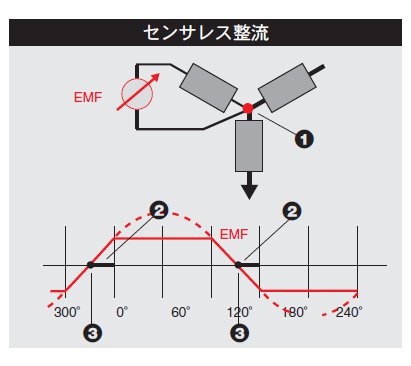
- 中点
- 30°の遅延
- EMFのゼロ通過点
正弦波整流
エンコーダを取付けることによりECフラットモータでも正弦波整流が可能です。これにより滑らかで高精度な回転が得られますが、コギングにより角度が制限されるのでご注意ください。


